BIN PICKING
Se Bin Picking af usorterede emner med robot
Venligst accepter marketing cookies for at se denne video.
At plukke emner, som ligger usorteret og vilkårligt i en europalle eller kasse med en robot, kræver et perfekt samspil mellem robottens nøjagtighed & intelligente scannere i 2D og 3D.
Robotten skal med andre ord kunne “se“, hvor emnerne befinder sig i kassen, hvordan de vender, vurdere om og hvordan emnerne kan gribes, samt udføre pluk i forskellige vinkler med forskellige gribepunkter. Danrobotics er eksperter i at integrere robot automation med 2D eller 3D teknologi så selv de mest komplekse bin picking opgaver kan løses.
EyeT+ Pick
EyeT+ Pick er et innovativt to-strålet laserguided scannersystem med vision, som i kombination med en robot gør det muligt at automatisere plukning af usorterede emner direkte fra kasser eller paller. Ved hjælp af EyeT+ Pick kan robotten lokalisere emnerne i kassen og ”se” hvilket emne der ligger mest tilgængeligt, og hvordan næste emne skal gribes/tages ud af kassen.
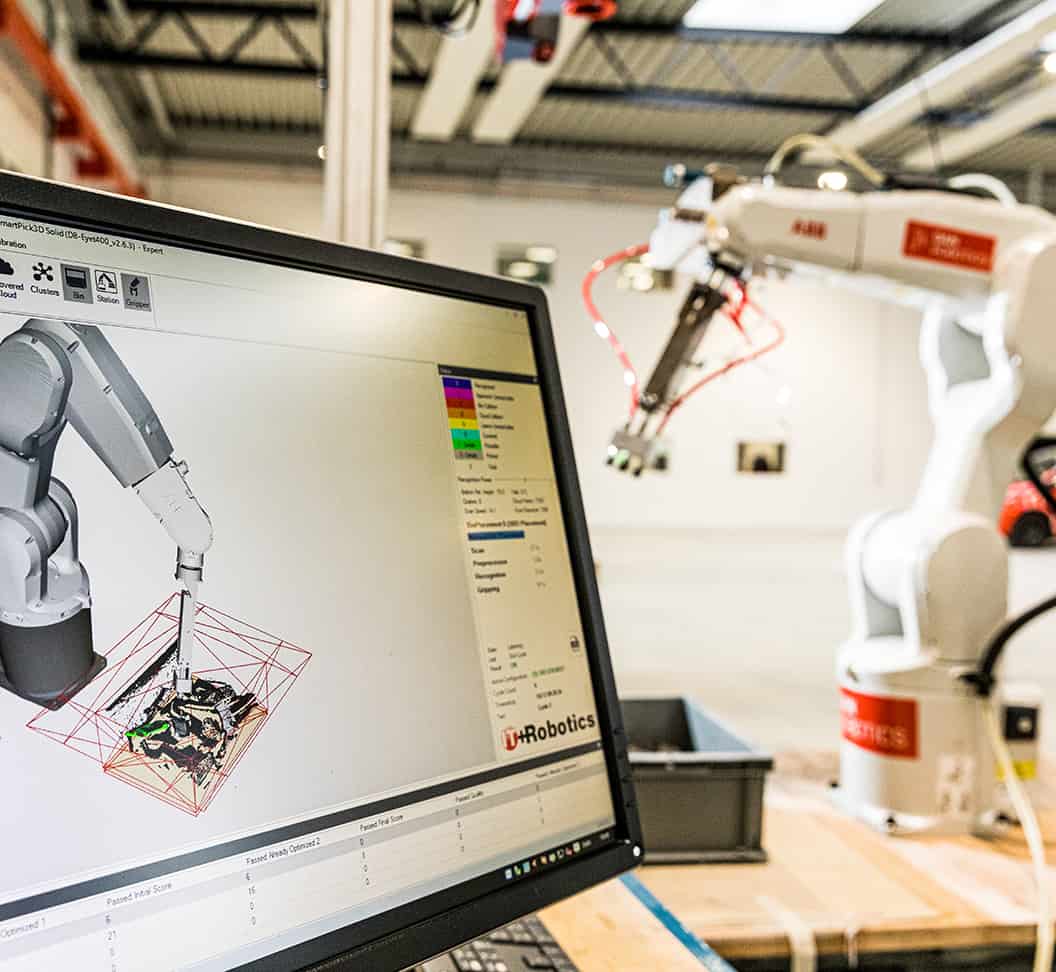
Sådan fungerer EyeT+ Pick
EyeT+ Pick producerer ved hjælp af to vinklede lasere, et vision-kamera og en servomotor, en 3D rekonstruktion af kassens indhold. Systemets software returnerer oplysninger om tilgængelighed og gribepunkter for emnet. Herefter programmerer softwaren automatisk robottens bevægelser under hensyntagen til kollision med sider eller andre forhindringer.
Produktionen kan på den måde køre bemandingsfrit i en længere tid, og man sparer den manuelle håndtering.
Hos Danrobotics er vi kendt for at gøre det umulige muligt – også når det gælder komplicerede Bin Picking opgaver, hvor Bin Picking skal indgå samspil med andre processer såsom montage eller videreforarbejdning. Kontakt Michael Dongsted, og hør mere om hvordan du kan effektivisere din produktion med robot automation.
tel:+45 44 12 25 22